sundays
Camera Tracking — Static Shots Workflow
The Levi’s film consisted entirely of completely static shots — typically dialogue, reaction, or ambient moments where the camera remained locked on a tripod. These sequences still required precise matchmove to ensure perfect parallax and spatial accuracy for robot and CG city integration.
3DEqualizer — Lens Distortion Workflow
For all hero and key environment shots, we initially explored 3DEqualizer to establish a physically accurate camera baseline.
However, we concluded that for this project’s predominantly static shots, FSpy (discussed later) would be more effective and time-efficient. That said, we continued to use 3DEqualizer specifically for lens distortion calculation, as we believe the best results for distortion mapping can only be achieved with this tool.
Even static frames benefit from proper lens calibration to ensure accurate scale and alignment with the CG scene layout.
Workflow
- Lens Calibration Setup — For each lens used during the shoot, we performed a dedicated distortion calibration in 3DEqualizer using reference grid charts and lens data captured on set. This allowed us to generate precise distortion maps (.ldf) for every focal length.
2. Distortion Analysis — Using 3DEqualizer’s distortion model, we analyzed radial and tangential warping across the frame. The resulting curve data provided an accurate base for lens undistortion inside Nuke and Maya.
3. Lens Profile Export — Each calibration file was exported as an undistort/redistort pair to ensure a reversible workflow — meaning all CG renders could later be redistorted back into the original plate space without quality loss.
4. Cross-Software Validation — The undistortion maps were tested directly in Nuke to confirm pixel-perfect alignment with tracking markers and plate geometry. This ensured that every camera (including those solved in FSpy) matched the same optical characteristics.
Using 3DEqualizer strictly for lens distortion calibration allowed us to maintain optical consistency across the entire film, even when the main camera reconstruction was handled through faster tools like FSpy.




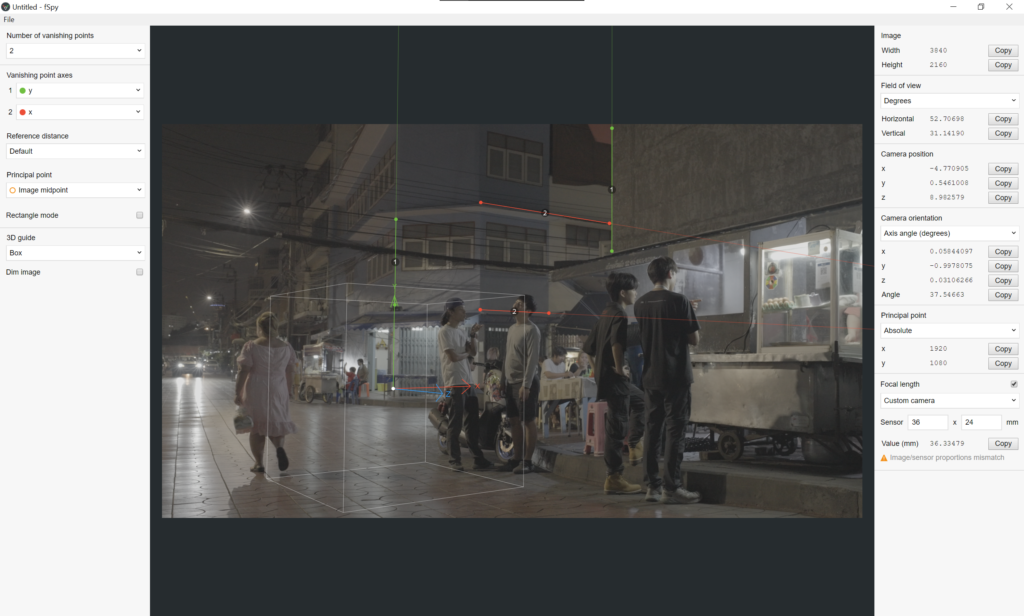
FSpy — Accelerated Matchmove for Static Shots
Because the project was executed under tight production deadlines, we optimized the workflow for time efficiency without sacrificing spatial accuracy.
For approximately 80% of static shots, we used FSpy, an open-source camera matching tool, to perform quick camera reconstruction directly from a single frame.
FSpy proved especially effective in shots with:
- No camera movement (locked tripod).
- Strong architectural lines (buildings, walls, tiles).
- Minimal depth variation.
Workflow:
- Extracted key frames from the final plates.
- Defined the vanishing points and horizon using perspective guides within FSpy.
- Set known physical dimensions (object height or table size) to define scale.
- Exported the reconstructed camera to Blender or Maya, and validated alignment by overlaying proxy geometry in Nuke.
- Applied manual fine-tuning for camera tilt and focal length to ensure perfect shadow alignment during CG lighting.
This method reduced setup time per shot from several hours to under 15 minutes, while maintaining the level of precision needed for seamless robot integration.
Validation and Integration
Every FSpy or 3DEqualizer camera was tested within Nuke by projecting geometry onto the live plate to confirm perspective accuracy.
If alignment drift exceeded acceptable tolerance, the camera was re-solved or manually adjusted within Maya.
Key validation passes included:
- Grid projection tests (confirming lens distortion).
- Robot proxy placement for ground contact accuracy.
- Reflection and shadow test renders.
The combination of 3DEqualizer for precision and FSpy for efficiency allowed us to maintain both speed and reliability — critical for delivering the project on time without compromising visual quality.