Scene Geometry — Environment Reconstruction Workflow
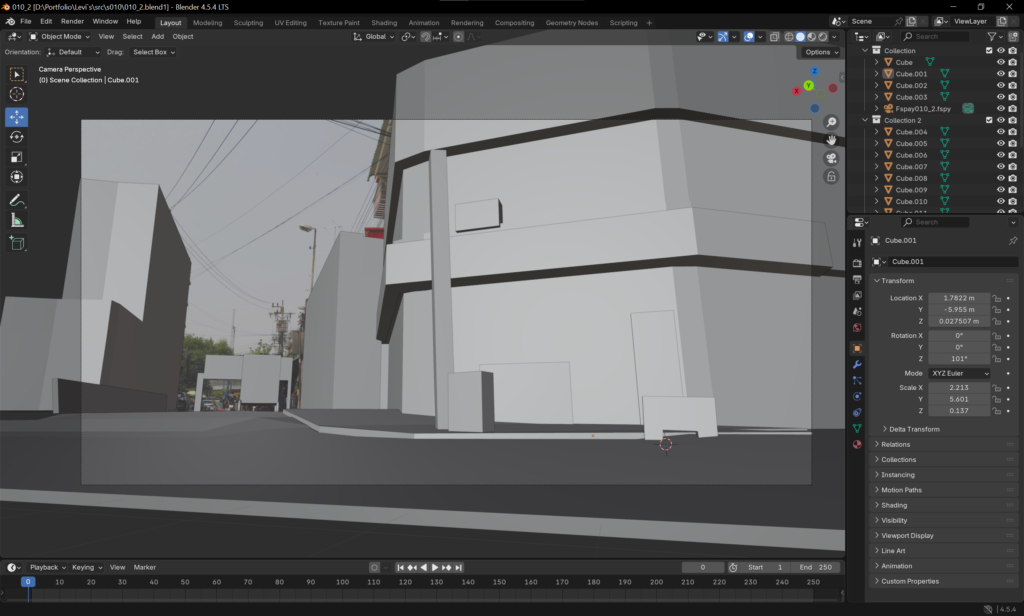
Once cameras were solved, we rebuilt key environment geometry for realistic lighting and shadow interaction.
This included streets, walls, props, and ground planes — essentially everything the robot would physically interact with.
For this project, 90% of the geometry was created in Blender, as the majority of shots required only basic structural accuracy without heavy modeling detail.
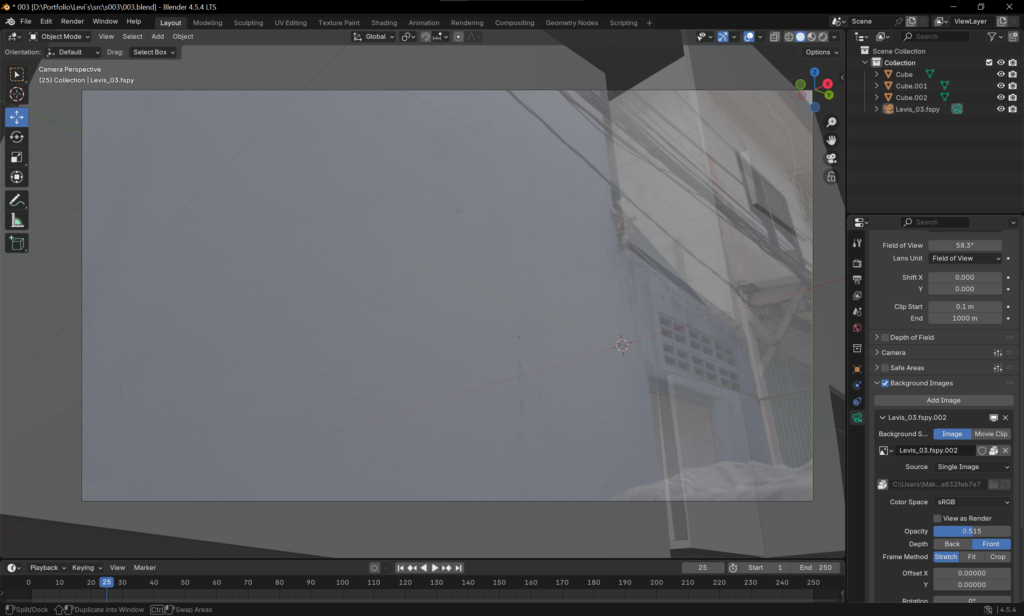
Blender provided a fast, flexible way to block out volumes, check parallax alignment, and prepare geometry for lighting and compositing.
In cases where more precise or localized reconstruction was needed — for example, curved surfaces, small props, or perspective-sensitive areas — we used ModelBuilder directly in Nuke.
This allowed us to quickly model and project geometry straight from the original plate, maintaining perfect spatial alignment without leaving the compositing environment.
Main Goals
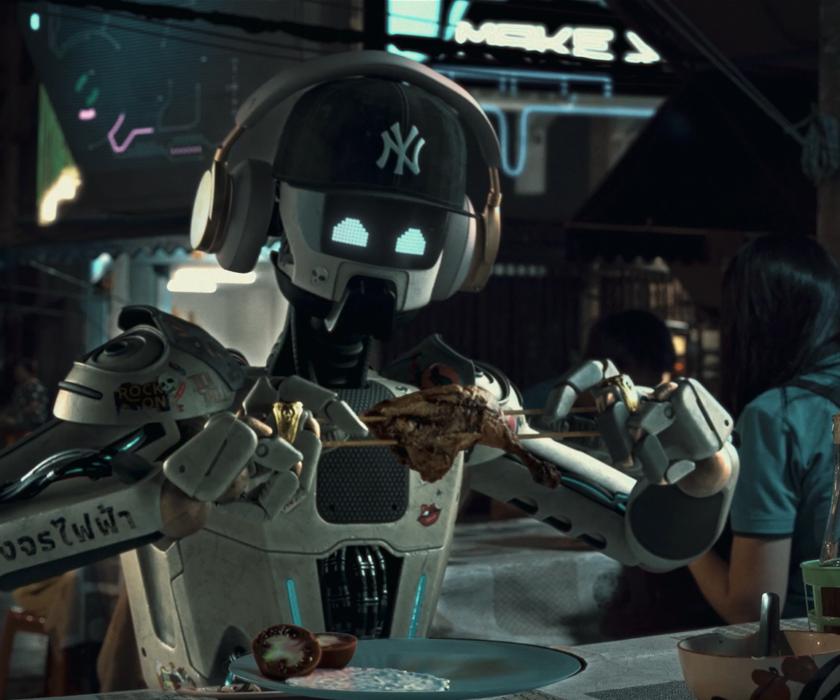
Create accurate shadow catchers and contact surfaces for robot integration.
Enable realistic GI and reflection accuracy during rendering.
Provide collision references for animation and simulation passes.
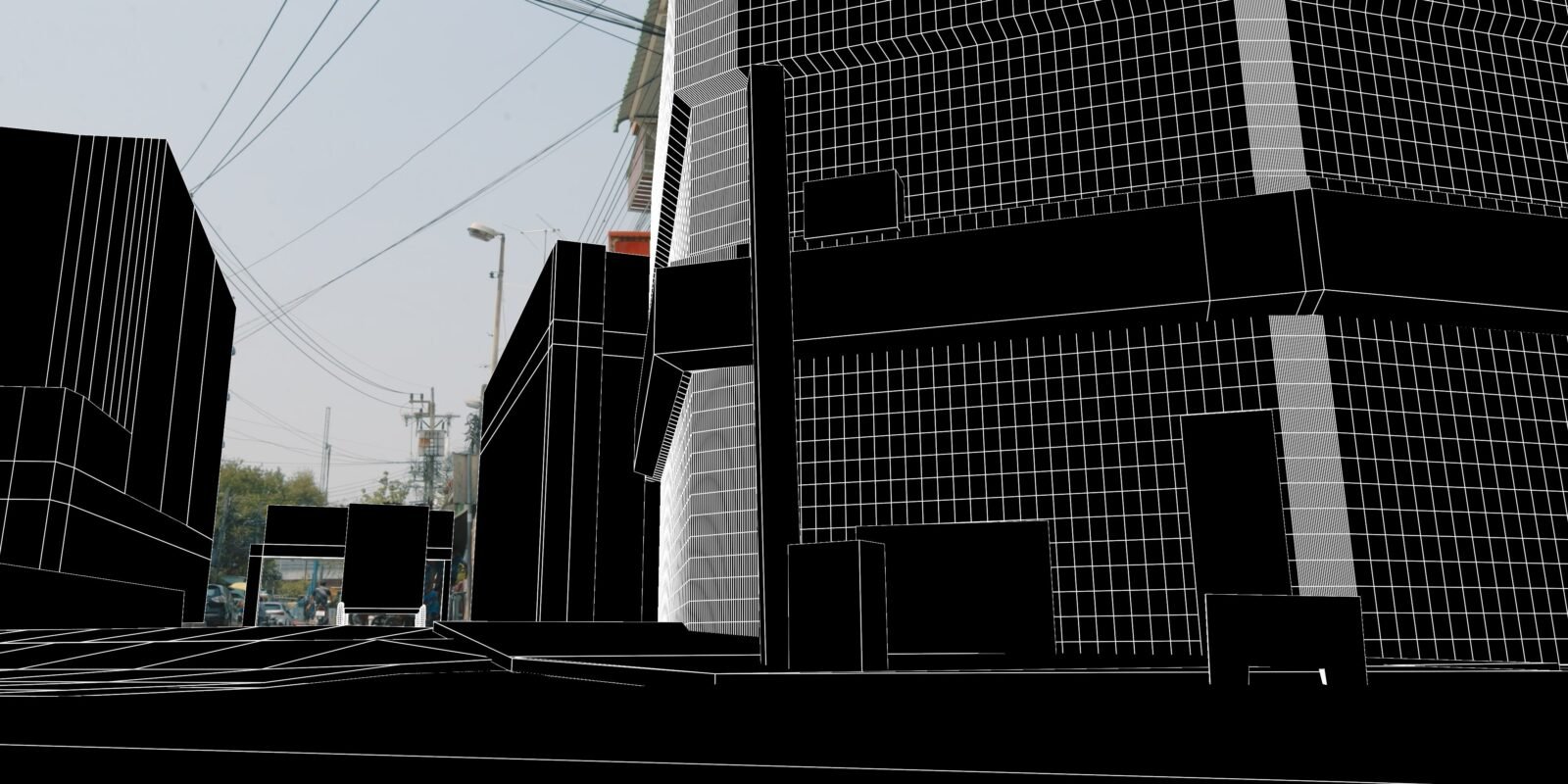
Ensure geometric continuity between Blender layouts and Nuke projections.
Geometry proxies not only helped with lighting — they kept the robot’s physical logic grounded in real-world scale and perspective.